ŷ��רҵ�ṩ�ִ������������졢���˰��˻����˲�Ʒ
���Ҹ��¼�����ҵ��������ר��������ҵ�����AGV���˻���������12��
ȫ���������� 400-007-3860
���Ҹ��¼�����ҵ��������ר��������ҵ�����AGV���˻���������12��
ȫ���������� 400-007-3860






Ŀǰ�����Ա����ڷǽӴ��ϰ���̽��ļ�����Ҫ��4�֣������༼�������⼼���������������������������м���ɨ��ʽ�Ͷ�̽ͷ������ʽ������AGV�ϵ�Ӧ���Ѿ����죬���������ַ�ʽ�������ڹ��̲�Ʒ��֤�Ρ�
1 ����ɨ��̽��
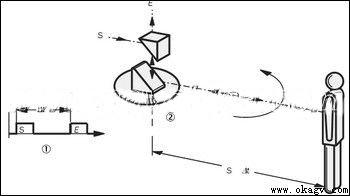
����ͼ��ʾ������̽��ͨ���Dz��ù����Ƶķ�ʽ���ɼ�����������ⷢ�侭�����Ƶ����弤������Laser Beam��S�����ü������������巴�����ʱ���ɼ���̽�������ܵ�ͬ���������ź�E��ͨ����S�źź�E�ź�Сʱ���ļ��㣬���ܹ��õ����ⷢ����ڱ��� ����֮��ľ����ˡ��ڼ��ⷢ�����ϼ�����ת������ʹ��̽��ijһ���η�Χ�ڵ����壬�Ӷ�ʵ�ּ���ɨ���ϰ���̽�⡣
�����ԭ����������Ҫʵ��ȴ�������£����ѧ�����ľ��ȣ�ʵʱ���㾫�ȺͿ��ƾ���Ҫ��ʮ�ָߡ�
ĿǰӦ����AGV�ϵļ���ɨ���ϰ���̽��IJ�Ʒ���ɵ¹�SICK��˾������S3000�� ���ŵ��ǣ����Ƚϸߣ��������Ժã����Բ��ñ�̷�ʽ��̽����������趨����һ������ѧϰ���ܡ���ȱ���ǣ����ڼ�������ԣ����۲���Բ���������������� ɨ�跶Χ��ֻ������һ��ˮƽ����ƽ���ϣ��ڴ�ֱ�����ϵľ����Ժܴ������Ļ�����ͻȻ����ڰ�����ʱ���ж�ʱ�ġ���ä���������ڲ��ø߾��ȵ��������� ��������۸�ܸߣ�һ���û����߱�������б�̵���������������̽�ⷶΧ����Ҫרҵ������Ա�ֳ����������ά������Ҳ����Ӧ���ӡ�
2 ��̽ͷ�������̽��
������AGV��Ӧ������ķ�������ĿǰΪֹҲ������Ϊ�ձ�ķ�����
ͨ���Բ���Ϊ0.76~1000um�ĺ������е��Ʒ��䣬���ܷ�������Ĺ��ߣ�ͨ�������ǿ�����㱻̽������ľ��룬���ں����IJ�����Χ�Ͽ���ijһ�����Ĺ��ߺ����ױ��ض����������գ������ǿ��˥������Ȼ��ͬ������������ԭ������������Ϊ����ֵ��
Ŀǰ������AGV�ϵĶ�̽ͷ�������̽������Ʒ�ܶ࣬�������ձ�SUNX��˾������P2ϵ�в�Ʒ��Ϊ���죬�ѱ�����AGV���������Ͽɡ��ò�Ʒ���ŵ� �ǣ������ߵķ������ɢ�䣬̽�����ϴ���ṹ�������С��ʹ��ά�����㣬�û������е���̽����룻������IJ�Ʒ����϶࣬��Ʒ�۸���Խ� �͡���ȱ���ǣ���ͬ����Ժ��������ճ̶Ȳ�ͬ���ɵ���̽������ϵļ��������ڲ���Ϊģ���·��̽�⾫�Ȳ��ߡ�
3 ��̽ͷ������̽��
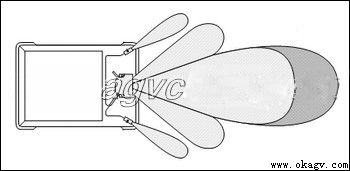
�������У������Ѿ������˳�����̽������Ӧ�èD�D���������״������Ҫ��������AGVȴ������ô���ģ��� һ��AGV�ϵ�̽��������ʱ���ڹ���״̬���� ��ʹ��������Ҫ�ڶ���AGV��ʹ�õij�����̽������̽�ⷶΧҪ���Զ��������AGV��ʹ�õij�����̽���������������ʱ�ij���������š�
��Ȼ������������δ�����ܱ�����AGV�ϣ������ڸü����������������ƣ�����Ƶ��Χ20kHz��100kHz����Ȼ�����̣�ָ���Ժã�����������Ժܲ�������ܵ���������ĸ��ţ��������ڹ�����Ӧ�ã�����⼼��һ��������Ҳ���ױ�ij���ض��IJ������գ���Ӱ���ྫ�ȡ�
4 ��̽��
���������������0.8��3GHz���Ķ�����ЧӦ�����״�ԭ���Ա����������̽�⣬Ŀǰ��AGV�ϻ�û��Ӧ��ʵ�����ô˼�������ʹAGV��̽����������̽�����������ذ�װ��������ľ����������˶����ٶȺ�����Ĵ�С�йأ����һ�㲻�������˶��豸�ϡ�
5 ����AGV�ϰ���̽������ѡ��˵��
����̽������ѡ�ͣ���һ������£������Ǹ����û��Ķ����۸��������ģ���Ϊ����ʽ�������ʽ�IJ�Ʒ�۸�����Ǿ�ġ����û������������û��Ը����Ʒ�����˽⣬�������û�ָ������������Ӧ�ļ۸�
6 ����˵��
AGV��һ��ʹ�û��������˹���������ȫ������Ȼʮ�ֱ�Ҫ����ֻ����ͻ�����ʱ�������ã�һ�㲻Ӧ����Ϊ���ⴥ����ȫ����ϵͳ��������AGV���ڲ�����������������ϵͳ�Ǻܲ����ģ�����������ʹ������Ӱ�쵼�����������ȣ�
��һ����AGV��������ʽ ��һ����AGV�Ե�����ʻҪ��˵��
Copyright © 2012-2023 ������ŷ�����ܻ����˹ɷ�����˾ ��Ȩ���С� ��ICP�� 19115608 ����xml sitemap
��ϵ�绰
400-007-3860QQ��ѯ
2448209188��

����ѯ