欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






AGV的导航计算介绍
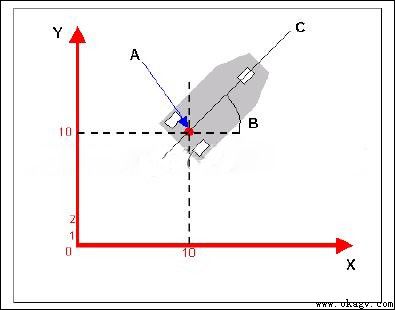
简单地说,AGV导航就是让AGV确实知道自己在哪里,即确定AGV自身在全局坐标系中的位置(x,y)和航向。如图所示,AGV以点A表示AGV在整个平面坐标系中的位置,即参考点,该位置除了x,y信息外还包含AGV行进方向与x轴的夹角信息(航向)。
AGV 导航的准确信息来自地面固定的靶标(定位块或激光反射板等),称之为AGV的“实际位置”,但通常限于场地条件及定位传感器条件的限制,实际位置信息的实 时性不能满足AGV运动控制的需要,为此在实际位置采样的周期内还须进行位置估算(Dead Reckoning)。
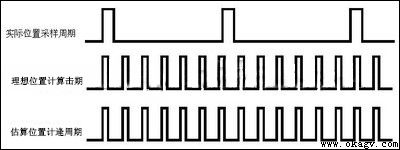
AGV的实际位置是指根据地面固定靶标计算而得到的实际位置信息,其精度取决于靶标的测量精度。
AGV的理想位置是指在理想状态下的位置,由AGV的路径轨迹方程所确定。
AGV的估算位置是指在实际位置的采样周期内,通过AGV当前速度和转向角信息对位置进行估算所得到的位置。
估算位置是真正用于AGV导引控制的,而实际位置只是定期对估算位置进行修正,导航所需解决的问题就是根据AGV的运动模型,估算出AGV的当前位置,即估算位置。
上一条:AGV的导引计算方法 下一条:AGV的驱动形式
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询