欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






自动导引车 AGV ( automated guided vehicle) 是指以各类电、磁、声、光传感器为自动导引装置,能够按照预设导引路径行驶的无人驾驶运输车[1]. 随着智慧工厂与智能物流的不断发展,重载 AGV 有望成为智慧仓储物流系统的关键角色,实现各生产环节物料的自动运输,保证整个生产线高效运行[2-3].
AGV的导航定位精度和路径调整能力是制约其在工业领域推广应用的瓶颈[4].当前的导航方式主要有磁导航[5-6]、惯性导航[7]、激光导航[8]、视觉导航[9]等.
磁导航运用电磁感应原理,其导航元件多种多样,如地标磁钉[5]、电涡流线圈和射频器件[6]等,虽然磁导航在AGV行业中应用广泛,但其铺设成本较高,不便于后期维护与调整,难以满足现代化柔性生产过程中的重载转运需求;惯性导航技术定位准确性高,灵活性强,但对控制算法的要求较高且容易受周围环境的影响;激光导航需在AGV行驶路径的周围安装激光反射板,对安装角度和位置都有非常精确的要求,成本较高,且易受环境干扰,不适合环境复杂的工厂环境;视觉导航利用图像处理技术进行导航,应用于工业重载AGV经济成本低、实用性强,但传统的视觉导航方式大多采用色带引导、扫码定位方式,在实际应用中存在路径铺设复杂、色带易受环境干扰等问题.在实际运行过程中,AGV的运行轨迹容易因非线性因素和系统内、外部扰动影响而出现偏差.
为了提高AGV系统控制精度,文献[10]将PID与模糊控制相结合,采用模糊规则对PID控制参数进行在线调整,虽然系统具有一定的鲁棒性,但对复杂多变的应用环境适应性较差.文献[11]提出的自适应反演滑模控制方法使系统响应更快,鲁棒性更强,且具有良好的瞬时性能,但用于重载AGV易出现抖振现象,直接影响控制效果.自抗扰控制 ADRC(active disturbance rejection control)技术在PID控制基础上,将非线性因素和系统内、外部扰动视为总扰动,通过构造扩张状态观测器对总扰动进行实时估计与补偿,消除各种不确定因素的影响[12],具有控制参数少、收敛速度快、误差补偿效果好等优点.
基于此,本文拟采用3个独立高速单目相机,对基于色带引导和扫码定位的传统视觉导航方式重载AGV结构进行改进,在AGV控制系统中采用ADRC控制策略对扰动进行实时补偿,以期提高AGV的运动灵活性和导航精度.
AGV运行时的导航灵活性和精度是评价其系统性能的关键因素. 导航的灵活性与导航方式和AGV结构有关,导航精度与AGV控制算法有直接联系.
本文对采用传统视觉导航方式的重载AGV结构进行改进,将色带引导和扫码定位导航中的1个或2个单目高速相机改为3个独立单目高速相机(3C),且对其铺设方式进行优化,改进后的AGV无需色带引导,只需扫码就可以实现导航,AGV运行灵活.在AGV控制算法上,采用ADRC策略对扰动进行实时补偿,以消除各种不确定因素的影响,使AGV运行稳定、快速响应,能适用于复杂车间环境.经过改进的3C视觉导航重载AGV结构如图1所示,其中AGV中心轴①―③位置安装高速单目视觉相机,且相机1与相机2之间的中心距离和相机2与相机3之间的中心距离相等. 相机采用PGV光学相机,通过双舵轮驱动设计,可实现原地360°转弯; 为避免冲突,在④―⑦位置上安装激光避障雷达.
AGV控制系统结构如图2所示,主要由电池管理模块、避障模块、3C 视觉导航模块、伺服驱动与转向模块、车载控制模块和上位机控制模块等组成. 控制系统采用分布式控制,由两级微机组成,车载控制模块采用西门子S7-1200PLC,上位机控制模块采用工控机,既可以实现单AGV独立运行,又可以实现多AGV同时运行.
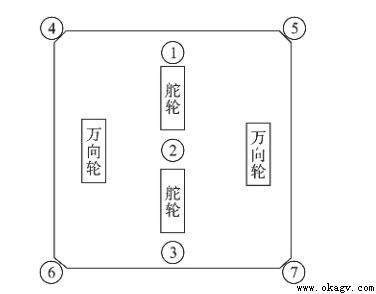
图 1 改进后的3C视觉导航重载AGV结构
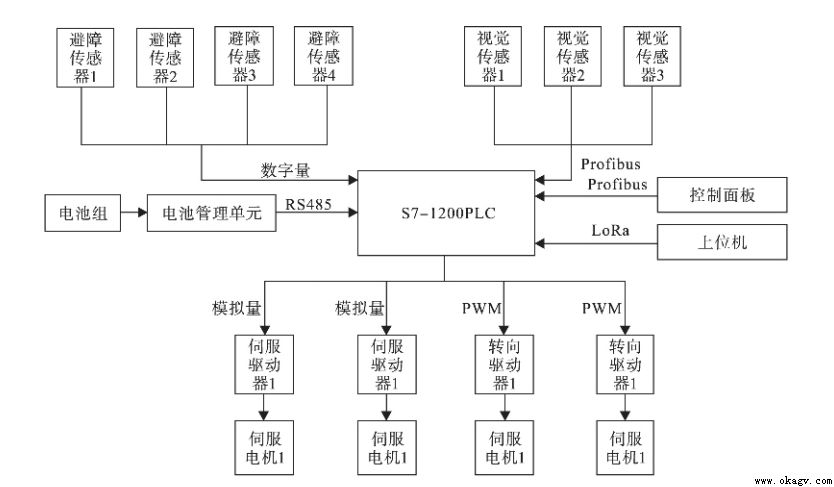
图 2 AGV 控制系统结构图
根据改进后AGV上3个相机分布的结构特点,设计数据矩阵码的铺设方式,相邻两个数据矩阵码之间的中心距离与两个相机之间中心距离相等.AGV导航示意图见图 3,其中编号5―8是铺设在地面上的数据矩阵码.当AGV从站点5运动到站点6时,AGV运行分为两步:1)相机1与相机3同时分别扫描站点6与站点5的信息,AGV减速运行; 2) 当相机2中心位置与站点6中心位置坐标重合时,AGV停止.
在行进过程中,AGV难免会出现轨迹误差,因此为保证AGV轨迹出现误差后能及时进行修正,3个独立相机在站点间运行时(即从矩阵码进入扫描区到离开扫描区),不断扫描站点误差,并将扫描误差信息实时传递给上位机.上位机控制算法对其轨迹进行修正并下发给AGV进行轨迹跟踪,从而实现AGV导航.视觉相机在AGV中轴线上,AGV偏移量由数据矩阵码偏差值和偏移角度组成.在AGV运行过程中,相机在某时刻扫描某数据矩阵码时偏差和偏移角度如图4所示.图4以相机读取区域建立局部坐标系,以工作车间建立全局坐标;由1,2,3,4组成的正方形区域是数据矩阵码,偏差角是α0.在AGV运行过程中,只要有一个相机扫描到数据矩阵码,前、后舵轮就会同时自动地进行误差修正,这种修正方式较灵活,运算量较小.
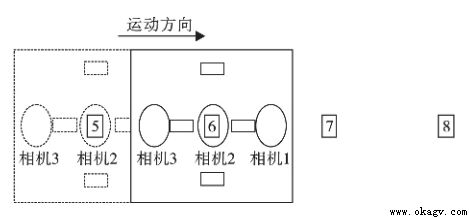
图 3 AGV导航示意图
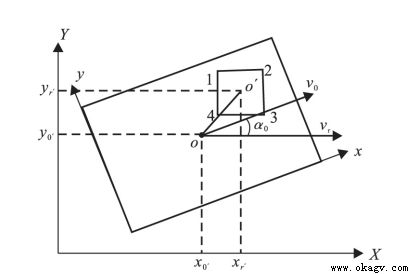
图 4 扫描数据矩阵码偏差和偏移角度示意图
全局坐标下相机读取区域中心位姿为O(x0',y0',α0'),将其转化为AGV偏差位姿O(x0,y0,α0).数据矩阵码中心位姿为O'(xr',yr',αr'),将其转化为AGV期望位姿O'(xr,yr,αr).AGV期望轨迹运动学模型为
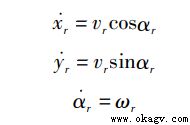
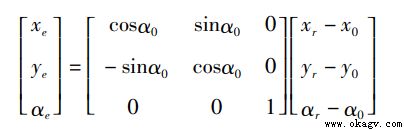
其中,vr为期望速度,ωr为期望角速度,αr值可为0°,±90°,180°.将全局变量下位姿误差转换到局部变量下AGV位姿误差公式[13]为
局部坐标下AGV位姿误差微分方程为
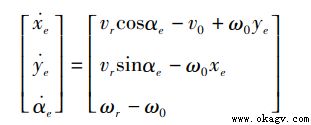
其中,v0为AGV运行速度,ω0为AGV运行角速度.
在AGV系统中,ADRC是用于上位机控制模块的控制算法.通过3C视觉导航采集的坐标信息传递给上位机,经过上位机中的ADRC跟踪器进行修正,将修正后的坐标指令下发给PLC,再通过PLC对AGV进行控制.
ADRC跟踪器主要包含微分跟踪器、扩张状态观察器和误差反馈系统.微分跟踪器( TD) 线性状态方程为
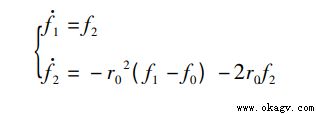
其中,r0 为跟踪速度因子,r0 越大跟踪速度越快; f0为输入信号; f1,f2为 f0的跟踪信号.
扩张状态观察器( ESO) 线性误差方程为
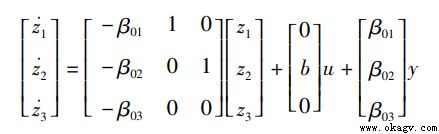
其中,u为被控系统输入;y为ADRC输出;z1,z2,z3为系统状态变量估计值;β01,β02和β03为设置参数;b为控制量系数.误差反馈控制系统中目标与输出值之间的误差及其微分误差信号和被控系统输入,相应计算公式分别为
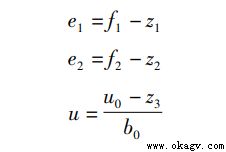
其中,e1是误差,e2是微分误差,b0为可调参数,u0为系统的控制律.
跟踪控制器结构如图5所示,AGV轨迹姿态误差值[xe,ye,αe]T 是ADRC输入,ADRC输出是[xe,ye,αe]T,系统输出是AGV实际运行姿态[x0,y0,α0]T,此时系统是三输入三输出,因此需要3个独立ADRC控制器,将轨迹姿态误差看成3个单输入单输出系统.
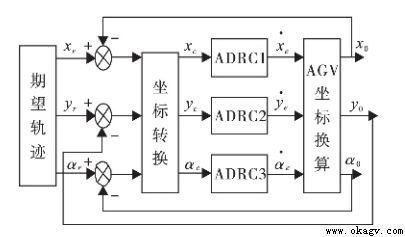
图 5 AGV 轨迹跟踪控制器结构
3个独立 ADRC 的控制律 u0x,u0y,u0α为
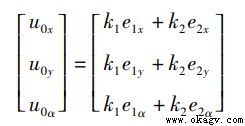
其中,k1和k2分别是比例和微分控制增益; e1x,e1y,e1α是3个独立ADRC的姿态误差; e2x,e2y,e2α是3个独立ADRC的微分姿态误差.
为了验证本文设计的基于ADRC的3C视觉导航重载AGV系统的性能,以Matlab为平台进行仿真. 设定AGV速度为1m/s,ADRC控制参数r0= 10,b0 = 1,w = 10,β01 = 30,β02 = 300,β03 = 1000,k1 = 5,k2 = 3. 圆形轨迹和直线轨迹跟踪曲线与位姿误差曲线分别如图6和图7所示,图中轨迹跟踪曲线横、纵坐标表示AGV在全局坐标下的轨迹位置;位姿误差曲线横坐标表示AGV运行时间,纵坐标表示AGV在全局坐标下的位姿误差.
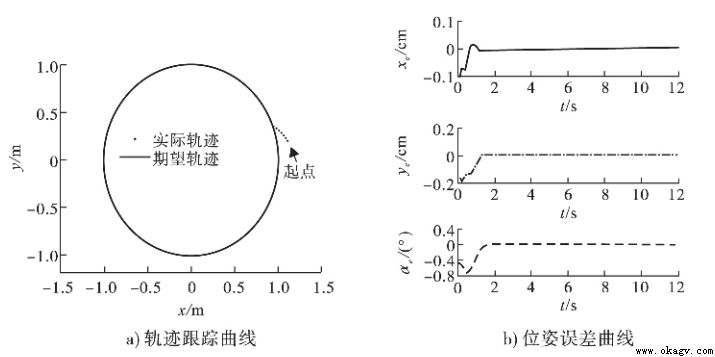
图 6 圆形轨迹跟踪与位姿误差曲线
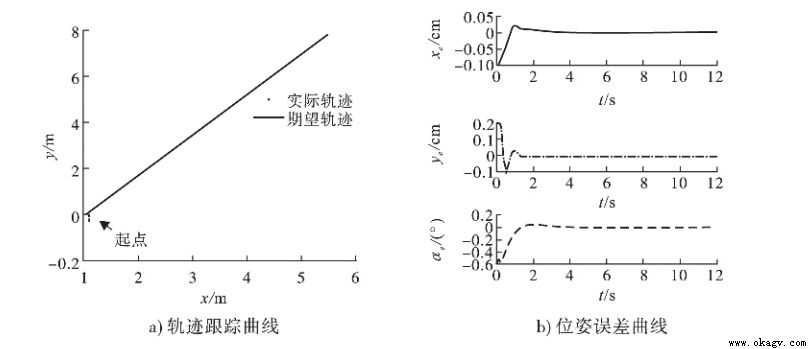
图 7 直线轨迹跟踪与位姿误差曲线
由图6和图7可知,设置AGV起始位置在轨迹外,从初始时刻开始,圆形轨迹中AGV能在1.9S时成功跟踪到给定的参考轨迹时成功跟踪到给定的参考轨迹;直线轨迹中 AGV能在3.9s时成功跟踪到给定的参考轨迹,说明基于ADRC的3C视觉导航重载AGV系统响应速度较快.运行稳定后,圆形轨迹中理想跟踪位置误差小于1mm,理想偏移角误差趋近于0;直线轨迹中AGV理想跟踪位置误差和理想偏移角误差趋近于0.因此,基于ADRC的3C视觉导航重载AGV系统能有效实现轨迹的实时跟踪且导航精度较高.
为了验证本文基于ADRC的3C视觉导航重载AGV系统在实际应用中的运行情况,在现场进行了实际运行测试.供测试用的AGV的长度为1.8m,车上安装的两个相邻相机之间中心位置距离为0.75m,因此铺设在地面上的相邻两个数据矩阵码之间的中心距离也为0.75m.设置的直线路径中,路径长15m,共铺设22个数据矩阵码,为进一步测试其转弯性能,在路径中的起始位置进行原地零半径转弯.在0.5m/s,1.0m/s,1.5m/s,2.0m/s,2.5m/s和 3.0m/s速度下,分别记录AGV前进( 后退)、原地左转(右转) 时的最大导航误差和最大偏差角,重复进行50次,然后取平均值,结果见表 1 和表 2.
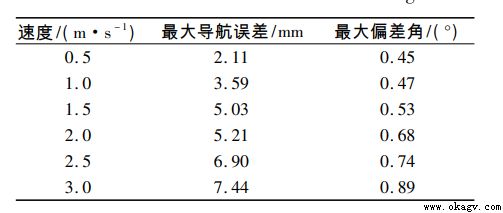
表 1 AGV 前进( 后退) 运行误差
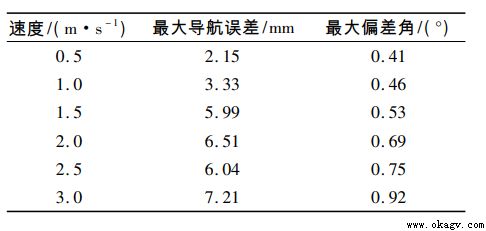
表 2 AGV 原地左( 右) 转弯误差
由表1和表2可知,在实际运行中,直行时最大导航误差为7.44mm,最大偏移角为0.89°;原地90°转弯时,最大导航误差为7.21mm,最大偏移角为0.92°.该结果与仿真结果中的理想精度有一定差距,这与实际的地面平整度、光滑度、AGV车体的制造工艺等因素有关.由此可知,基于ADRC的3C视觉导航重载AGV系统最大导航误差绝对值小于8mm,最大偏移角绝对值小于1°.此系统导航方式简单,数据矩阵码铺设便利,导航精度高,AGV 运行稳定且灵活.
本文对基于色带引导和扫码定位的传统视觉导航方式重载AGV结构进行了改进,设计了基于ADRC的3C视觉导航重载AGV系统.该设计采用3个独立单目相机,无需色带引导,只需铺设数据矩阵码即可实现导航,在导航控制算法中采用ADRC以有效消除各种外界干扰.仿真与实际应用结果表明,AGV运行稳定、灵活,响应速度快,最大导航误差绝对值小于8mm,最大偏移角绝对值小于1°,在复杂车间环境下可实现轨迹的实时跟踪,性能高于同类产品且制造成本低,具有较高的工程实用价值.在该研究成果的基础上,下一步将在ADRC控制中引入人工智能算法,利用智能算法自动调节ADRC中需要设置的常数参数,将其变成动态调整变量,进一步提高ADRC收敛速度,减少所需参数设置,进而提高AGV运行响应速度.
[1] BACIK J,DUROVSK YF,BIR0S M,et al. Pathfinder-development of automated guided vehicle for hospital logistics [J]. IEEE Access,2017,5: 26892.
[2] 过金超,赵海洋,蒋正柯,等. 双向重载智能自主导航车系统设计[J]. 轻工学报,2017,32( 2) : 97.
[3] 高瑜,过金超,崔光照. 一种改进的多机器人路径规划自适应人工势场法[J]. 郑州轻工业学院学报( 自然科学版) ,2013,28( 6) : 77.
[4] 肖献强,程亚兵,王家恩. 基于惯性和视觉复合导航的 AGV 研究与设计[J]. 中国机械工程,2019,30( 22) : 1.
[5] LEE S Y,YANG H W. Navigation of automated guided vehicle suing magnet spot guidance method [J]. Robotics & Computer Integrated Manufacturing,2012,28( 3) : 425.
[6] LU S,XU C,ZHONG R Y. A RFID-enabled positioning system automated guided vehicle for smart factories [J]. Journal of Manufacturing Systems,2017,44: 179.
[7] JUNG K,KIM J. Intelligent autonomous systems[M]. Berlin Heidelberg: Springer,2013: 807 -816.
[8] OSMAN K,GHOMMAM J,SAAD M. Vision based lane reference detection and tracking control of an automated guided vehicle [C]∥IEEE Control Systems Society. 2017 25th Mediterranean Conference on Control and Automation. Piscataway: IEEE,2017: 595.
[9] XU Z,HUANG S,DING J. A New positioning method for indoor laser navigation on under determined condition [C]∥IEEE Control Systems Society. 2016 Sixth International Conference on Instrumentation & Measurement,Computer,Communication and Control. Piseatamay: IEEE,2016: 703.文章来源于AGV吧
[10] 王琳华. 磁导式 AGV 自动导航车控制系统的设计[D]. 长沙: 长沙理工大学,2013.
[11] 江亚峰,王彬彬,袁明新,等. 基于自适应反演滑模的全向 AGV 运动控制[J]. 计算机仿真,2019,32( 2) : 348.
[12] 韩京清. 自抗扰控制技术―――估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社,2008: 197 - 207.
[13] 罗蕊. 基于自抗扰控制的移动机器人轨迹跟踪[D]. 天津: 天津工业大学,2018.
上一条:AGV驱动轮减震悬挂系统常见形式 下一条:设置AGV的路线与调度方法?
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询