欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






如今很多的仓储物流公司都已经开始在使用AGV小车,那么AGV小车的导航方式原理是什么呢?其有什么优点呢,下面就由小编给大家普及一下这方面的知识吧。
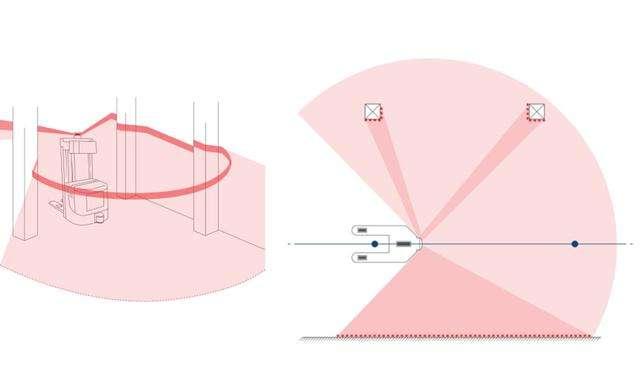
AGV小车激光导航工作原理优缺点
激光导航:AGV小车在行驶路径上安装精确反射板,AGV通过发射激光束,同时采集由反射板反射的激光束,从而确定其当前的位置以及方向。AGV小车初始位置计算:AGV小车停止不动,激光扫描仪至少可测4条光束,至少看到4块反射板,在已知反射板的精确位置(X,Y),AGV会连续的计算小车当前的位置,根据估算的新位置关联反射板,去修正自身位置,以此来修正下一步动作。
激光导航优点在于AGV小车定位精确,而且地面无需其他定位设施,行驶路径可以灵活改变。
激光导航缺点是由于激光导航控制复杂以及激光技术昂贵的投资成本,反射片以及AGV激光传感器直接不能有障碍物,不适合空中有物流影响的场合。
以上就是AGV小车的激光导航原理,希望能够帮到大家,后面会陆续有更多的资讯,请关注我们哦!
上一条:AGV的主要技术参数 下一条:盘点AGV的转向驱动类型
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询