ŷ��רҵ�ṩ�ִ������������졢���˰��˻����˲�Ʒ
���Ҹ��¼�����ҵ��������ר��������ҵ�����AGV���˻���������12��
ȫ���������� 400-007-3860
���Ҹ��¼�����ҵ��������ר��������ҵ�����AGV���˻���������12��
ȫ���������� 400-007-3860






1 ����
�Զ�������(AGV-Automated Guided Vehicle)���ִ�������ҵ������ϵͳ�е���Ҫ�豸����һ�������ƴ�����Ϊ���ģ�������Ϊ������װ�зǽӴ�����װ�õ����˼�ʻ�Զ��������س����������ռ��ϵͳ�´���������Ԥ����Ƶij������ճ��ش�����ȷ����λ����Ϣ�����Ź涨����ʻ·�ߺ�ͣ��λ���Զ���ʻ��AGV��������Ч�ʸߡ����ܡ������ɿ����������������͵��ŵ㣬�ѹ㷺Ӧ�����������ӳ����г���������չ�������Զ����ֿ⡢ҽԺ���������ģ�AGV��Ϊ��ҵ�Զ�������Ҫ��־֮һ������������С������ģ�ͳ�ģ��ʵ���������ϵ�AGV�������ú��������������AGV�ƶ���
2Ӳ��ϵͳ���
2.1�������
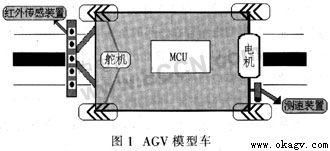
�����Զ��������������塢���������������Ͷ���װ�õ�4���֡����У����������С������200 mm��300 mm�����в������ĺ�������ģ�ͳ�ģ�⡣���������Ե�Ƭ��MC9S12DG128Ϊ���ģ���ϳ����ϵĴ������Ͷ���װ���Կ���AGV�ȶ����С��������ɲ���ĺ�������Ͳ��ٵĻ�����������ɡ�����װ����������������ֱ������Ͷ�����ɣ��ֱ�����ٶȺ�ת����4����������Ӧ��������·��������ʶ��·��������ģ�ͳ��ȶ����С�AGVģ�ͳ���ͼ1��ʾ��
��
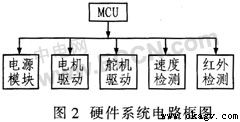
�� ��AGV��MCU���Կ���һ���Զ�����ϵͳ�����ɴ���������Ϣ�����������㷨��ִ�л���4������ɡ���Ӳ���������Ե�Ƭ��Ϊ���ģ����д�������ִ�л����Լ���Ӧ��������·���ɿ���ϵͳ����Ϣ����������㷨���ɿ���������ɡ�ͼ2��ʾ��Ӳ��ϵͳ��·��ͼ��
��
2.2 MCU����
���� AGV����MC9S12DGl28��Ϊϵͳ������������������128 KB��Flash��8 KB��RAM��2 KB��EEPROM��8�����˲�������Ƚ�ͨ����2��8λ��16λ�����ۼ�����8·PWM������ͨ����8·10λADCͨ����16·8λADCͨ����2 ��SCI��SPIͨ�Žӿڣ�80��112���ɱ��I��O�˿ڡ�
2.3��Դģ��
���� AGVģ�ͳ��Ķ�����7.2 V��2 A��h�����ṩ�����ڵ�·�еIJ�ͬģ������Ĺ�����ѹ������������ͬ�������Ҫ�����ѹ��·����ص�ѹת��Ϊ��ģ�������ѹ��LM7805�Ǵ�����ѹ���������ѹΪ5 V����ҪΪ��Ƭ��������������ٶȴ����������ֽӿڵ�·�ṩ��Դ����LM1117-ADJ���Ϊ2.85 V��6 V�ɵ���ѹ��Դ��ͨ����λ��������6 V��ѹΪ������硣����7.2 V��Դֱ��ΪACVģ�ͳ����ֵ�����硣
2.4�ٶȼ��ģ��
���� �ٶȴ�����ʹ��CS3020�ͻ���Ԫ��������Ԫ��ʹ�÷��㣬ֻ��һֻ�������轫���������Դ������������������̥�ڲ�ճ��4���Ÿ֣��ڴŸ����Է���ѡ����ʵط��̶�����Ԫ��������̥ÿת��һȦ������Ԫ�����4���źţ���̥�ܳ�Ϊ17 cm������ÿ�����ź�ʱ���ΪT��AGV��ʻ4.25 cm��ͨ������T������AGV���ٶ�V=4.5 cm��T��
2.5������ģ��
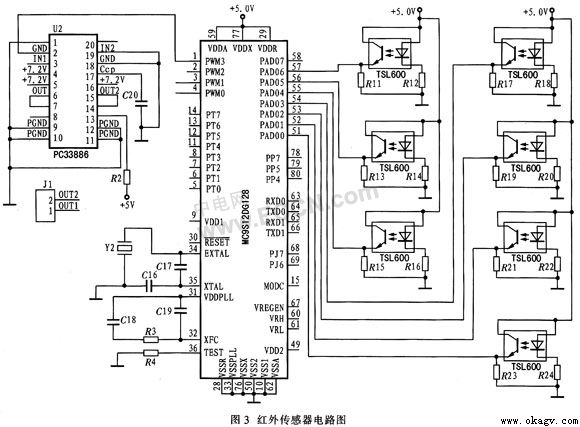
���� AGVģ�ͳ���������ʽΪ��������������Ÿ�Ӧ������ͼ��ʶ�����������Ե�����������������ȡ����ں������ʹ�÷��㡢�۸������������ȷ����Ӧ�ٶȿ���ŵ㣬��˱�ϵͳ��Ʋ��ú��������������AGVģ�ͳ���ʻ��ѡ�÷��书�ʴ��������ȸߵĺ�������DZ�֤�������·�ɿ������Ļ�������ϵͳ��Ƶĺ������ѡ�÷���ʽ����TSL600����ͼ3��ʾ���ұ��Ǻ��ⷢ������ܺͺ�����������ܣ����У�VCCΪ+5 V����R1=510 ����R2=20 k��Ϊ�������裬OUTΪ����źš����ⷢ������ܷ���ĺ������ݷ������ɫ�ʵ���dz���䵽���������ܵĹ�����ͬ��������������һ�ֹ��������ܣ����յ��Ĺ���Խ�࣬����ĵ���Խ�������AGVģ�ͳ�ǰ10 cm������װ7�Ժ��������AGV���᷽���ϰ�װ1�ԣ����������������װ3�ԡ�����7�Դ�����������źţ��жϺ�ɫ�����ߺ�AGVģ�ͳ���λ�ù�ϵ��Ϊ����ת���ṩ�ɿ������ݡ�������չܽ��յ�·����ĺ��������仯�ĵ�ѹ����ӳ���������ߵ�λ�á�������������Ϊģ������ͨ�� MCU��ADC��ģ����ת��Ϊ���������������ⲿ��·��ƣ�ͬʱ����������չܵ������仯��ѹ��Ϣ��ͨ�������㷨�õ�����ȷ��λ����Ϣ�������������ߵ�Ӱ�졣MC9S12DG128��8·10λADC��16·8λADC�����ǵ�8λ��Чֵ������ϵͳ����Ҫ��ϵͳ��Ʋ���16·8λADC�е�7·ͨ����
2.6��������ģ��
���� �����������PC33886��Ϊ��������������·ԭ����ͼ3��߲�����ʾ��MCU������PWM3ͨ��IN1�������룬�Ե���PC33886�� OUT1�˿ڵ������ѹ������IN2�ӵ�ʹOUT2���Ϊ0��ʹ��OUT1��OUT2֮�����һ��ѹ�MCUͨ���ı�PWM3��ռ�ձ������ڵ��ת�١�
3ϵͳ�������
3.1�����㷨
���� ����������ϵͳ�У���ƫ��ı���(P)������(I)����(D)���п��Ƶ�PID�����㷨����˹㷺��Ӧ�á���������PID�����㷨�ṹ���������ڵ�������Ӧ��ǿ����ϵͳ��Ʋ�������ʽ����PID�����㷨��ͨ��PWM����ֱ�������
3.2��������
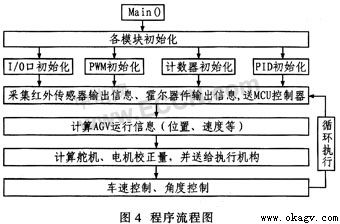
���� ��ϵͳ������������ͼ��ͼ4��ʾ��ϵͳ���ȳ�ʼ���豸��Ȼ����˲����ij������趨��Ϻ���жϣ����ѭ��ִ��λ���ٶȿ��Ƴ���
4 ������
���� ʵ������5 000 min��6 000 mm�������ڴU����ʻ��·�н��У�·���뻮��20 mm���ĺ�ɫ�����ߡ���������£�����AGVģ�ͳ����ٶ�����Ϊ1 m��s��AGVƽ����ʻ���������ϣ��ӳ����㿪ʼ����ʶ����յ㲢ͣ����ȫ�̹���ʱ22 s������AGVģ�ͳ��ٶ�����Ϊ1.5 m��sʱ��AGV�Ƚ�ƽ�ȵ���ʻ���������ϣ�ȫ�̹���ʱ16 s������AGVģ�ͳ��ٶ�����Ϊ2 m��sʱ��AGV��ʻ���ȶ����ڹ��䴦��ʱ���������ߣ�ȫ�̹���ʱ12 s����������ʵ�飬AGV�ȶ�������ƽ���ٶ�Ϊ1 m��s��AGV���Ǿ��ٳ�������ҵ�ֳ�һ�����ȶ�����ȫΪ��Ҫ�������أ����Ա���Ƶ�ģ�ͳ����ȶ�������ȫ����AGV���Ĺ淶���ﵽ����������������Ч�ʸߡ����ܡ������ɿ���������Ҫ��
��һ������Ȼ����AGV�ڼҵ���ҵ��Ӧ�� ��һ���� AGV����װ�����Ӧ��
Copyright © 2012-2023 ������ŷ�����ܻ����˹ɷ�����˾ ��Ȩ���С� ��ICP�� 19115608 ����xml sitemap
��ϵ�绰
400-007-3860QQ��ѯ
2448209188��

����ѯ