欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






随着我国的制造业转型升级步伐的加快,机械自动化代替人工劳动力也成了当今的重点。相比以前,如今的物流及物料搬运形式已逐渐地由传统人工搬运转为智能自动搬运形式,AGV 已是目前国内制造业应用最广泛的搬运机器人之一。
AGV最早源于仓储物流,其中的应用环境条件比较良好,并且AGV的应用场地也有相关的标准定义。随着智能物流的飞速发展,AGV现已涉足制造业、港口搬运、安防巡检等领域,应用的领域范围扩大意味着运行场景的复杂度提升,因此,AGV的适应性能也应当提高。作为AGV的适应结构之一的减震浮动结构,目前,其结构形式繁多,对于不同的 AGV 底盘形式、承载量,减震浮动结构也不同。本文通过列举目前AGV 常见的减震浮动结构形式,加以研究分析其减震的特性,以对AGV 的悬挂浮动系统设计提供特性分析以及理论参考。
大体上来说,AGV的减震浮动结构是要使AGV获得可以在复杂路面上行驶的性能,其具体发挥的作用:
(1)轮系共同着地。在AGV具有多轮的布局轮系中,为保证驱动轮着地,一般的想法是将驱动单元安装得比其他辅助轮凸出来以保证驱动轮的首先着地。但如此一来。辅助轮实际并没有与地面贴紧,导致更多的载荷施加到驱动单元上,降低了AGV的承载能力的同时,AGV的行驶稳定性也会降低。
那么,在上述的基础上,减震浮动结构使驱动单元具有上下压缩的自由度。如图1所示,在驱动轮外凸下,通过AGV的自重将驱动轮压至与辅助轮平齐。通过减震浮动结构来实现多轮共同着地问题,保证了AGV的驱动力外,辅助轮的着地也分担了一部分的承载。
(2)适应不平路面。在AGV的作业环境中,路面的不平会导致驱动轮悬空以致使AGV失去动力或被顶起。减震浮动结构中的弹簧会使驱动轮始终与地面贴紧,遇到凸起路面时,由于驱动单元的浮动性以及弹簧的可压缩性,可避免驱动单元带动AGV整体被顶起。弹簧的反作用力使驱动轮始终与地面贴紧,地面也时刻提供驱动轮支承力以保证具有足够的附着力,保证了AGV不会因路面不平而失去动力。
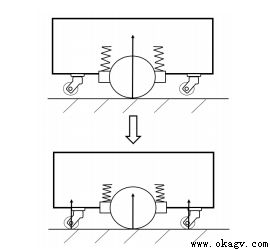
图1 AGV自重将驱动轮压至平齐
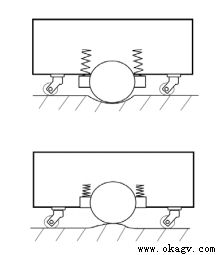
图2 浮动结构的路面适应性
(3)减缓冲击力。路面的不平以及行径方向的障碍物会对驱动单元造成冲击,而减震弹簧将其冲击吸收,有效缓解冲击力对驱动单元的破坏,延长驱动单元的使用寿命。
为了保证减震浮动结构能发挥上述的具体功能,其结构的设计应当满足一定的条件,否则,会出现浮动刚度过大或过小所引起的功能失效。
现假定减震弹簧的所需刚度为k、路面起伏不平度为±δ、驱动轮安装外凸量为λ。那么,在分析减震浮动结构中,应当把AGV的作业路面状况分为三种来
具体分析:
(1)平地路面。平地路面是AGV作业时间最长的工况,此时,AGV应该保证所有轮子共同着地、各轮的承载在其额定承载范围内、驱动轮的附着力足以防止轮子打滑。
当AGV所处平地路面时,即驱动轮与其他辅助轮处于平齐状态,那么,此时的减震弹簧相当于被压缩了外凸量λ,此时,驱动轮与地面的作用力FN1为:
FN1 = (Δ+λ)・nk
式中,Δ为弹簧的安装预压量;n 为弹簧数量。
在承载上须满足:
FN1 ≤ Fmax1
FN2 ≤ Fmax2
FN2 = f(FN1,G)
式中,Fmax1驱动轮的额定负载;FN2平路上辅助轮的支承力;Fmax2为辅助轮的额定负载;G为AGV工作
整体重量;f(FN1,G)关于FN1和G的方程式,轮系结构的不同,其计算方程也不一样。
在驱动轮附着力 Ff上须满足:
Ff > Fq
Ff = FN1・μ1
Fq = G・μ2
式中,Fq为AGV行走所需牵引力;μ1为驱动轮与地面的附着系数;μ2为AGV的滚动摩擦系数。
(2)凹陷路面。在凹陷路面中,为使驱动轮贴紧地面,减震弹簧会将驱动轮顶紧地面,此时,弹簧相比平地路面时形变量以及驱动轮的压力均变小,而其他辅助轮的压力变大。
从图 3 的几何关系可知,当 AGV 所处凹陷路面时,此时,减震弹簧的压缩量实际是外凸量与路面不平度之差,由此可见,驱动轮的外凸量必须大于路面不平度,
否则,在凹陷路面时驱动轮会处于悬空状态。
如果保证了AGV在平地中所有轮子共同着地且驱动轮的外凸量大于路面不平度,则AGV处于凹陷路面时所有轮子也必定共同着地,因此,需保证的是各轮的承载其承载范围内、驱动轮的附着力足以防止轮子打滑。
此时,驱动轮与地面的作用力FN1'为:
FN1 = (Δ+λ-δ)・nk
λ > δ
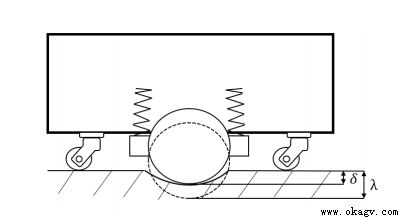
图3 凹陷路面时的弹簧形变量
相比平地路面和凹陷路面,弹簧形变量减少,则驱动轮负载变小而辅助轮负载变大。由于凹陷路面的工况频率低于平地路面,即辅助轮的大负载工作时间较短,
此时,辅助轮负载处于其极限负载范围内即可(如该工况频率较高,则须处于额定负载范围内),则减震浮动结构在承载上须满足:
FN1' ≤ Fmax1'
FN2' ≤ Fmax2'
FN2' = f(FN1',G)
式中,FN2'为凹陷路面上辅助轮的支承力;Fmax2'为辅助轮的极限负载;f(FN1',G)关于FN1'和G的方程式,轮系结构的不同,其计算方程也不一样。
在驱动轮附着力Ff'上须满足:
Ff' > Fq
Ff' = FN1'・μ1
(3)凸起路面。在凸起路面中,由于路面外凸将驱动单元的减震弹簧压缩,理论上减震弹簧的压缩量会大于平地时的弹簧压缩量。但如果弹簧在压缩过程的弹力已经足以支承 AGV 整体的重量时,那么,弹簧不再压缩,而是如同刚性连接一般将AGV整体顶起。如上述分析,此时,弹簧压缩量最大,因此驱动轮的负载最大。
为保证所有轮子共同着地,应保证凸起压缩弹簧时,弹簧的弹力不会将AGV整体支承起来,则驱动轮与地面的作用力FN1"须满足:
FN1" = (Δ+λ+δ)・nk
2FN1" < G [caption id="attachment_478" align="aligncenter" width="382"]
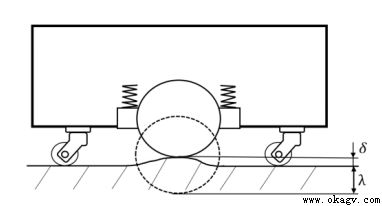
图4 凸起路面时的弹簧形变量[/caption]
凸起路面中,此时,驱动轮负载最大,辅助轮的负载最小。由于凸起路面的工况频率依然低于平地路面,驱动轮仅短时间承受大负载,所承载的负载处于其极限负载范围内即可。则减震浮动结构在承载上须满足:
FN1" ≤ Fmax1'
FN2" ≤ Fmax2'
FN2" = f(FN1",G)
式中,Fmax1'为驱动轮的极限负载;FN2"凸起路面
上辅助轮的支承力;f(FN1",G)关于FN1"和G的方程式,轮系结构的不同,其计算方程也不一样。
(4)综合条件。综合上述(1)、(2)、(3)3种工况下的条件,减震浮动结构需要满足的综合条件如下:
对于上述的综合条件,每项条件都可如上述分析构建起相关弹簧刚度的方程式以及范围不等式,通过刚度的多个范围条件,可确定出弹簧刚度在满足所有条件
下的取值范围。那么,在用于减震浮动结构的弹簧的刚度应当处于该取值范围内。
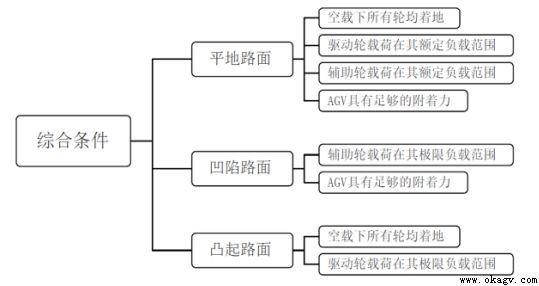
图5 减震浮动结构的综合条件
(1)铰接摆动式。铰接摆动式浮动结构是应用较多的一种减震结构,如图6所示,驱动轮与安装座固定并与车体形成铰接,则驱动单元与车体间可绕铰接点1旋转摆动,实现上下方向的浮动。通过在驱动单元与车体间设置弹簧减震装置,利用弹簧力来决定驱动单元的摆动幅度。
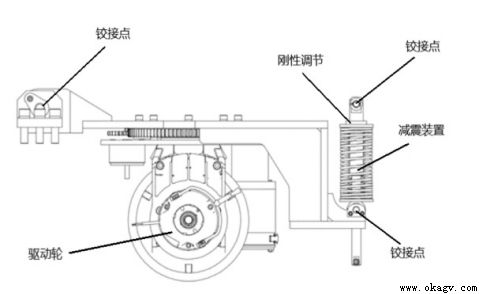
图6 铰接摆动式详细结构图
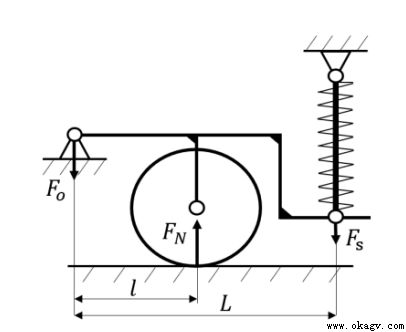
图7 铰接摆动式结构的受力图
该类结构的驱动轮支承力与弹簧反力间存在力臂的关系(如图7所示),在需要获得一定的驱动轮支承力下,实际弹簧所需的弹力比驱动轮支承力更小。然而,浮动量刚好相反,在驱动单元需要获得一定的浮动量时,弹簧的压缩量需要比驱动单元浮动量的更大。
基于上述特性,铰接摆动式浮动结构比较适用于大载荷、空间充足的AGV轮系布局上。力臂有效减小弹簧所需的刚度,但对摆动空间具有一定的要求。
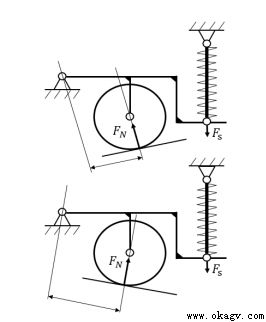
图8 铰接摆动式结构的双向差异性
当AGV在坡道中行走时,其坡道方向如图8的上图所示,其驱动轮支承力与摆动铰接点间力臂长度相比另一方向(图8的下图)的要短。在弹簧的压缩量一定时,即弹簧反力一定下,图8上图的驱动轮支承力更大,在AGV负载较大时,应当注意验算驱动轮载荷是否处于额定范围内。
(2)垂直导柱式。垂直导柱式浮动结构是通过驱动轮与安装座固定,安装座中设置有导套与导杆形成移动副,导杆上设置有压力弹簧的一种减震结构。驱动单元通过导柱导套副实现上下浮动,压力弹簧在垂直方向上给驱动单元提供竖直的反力。
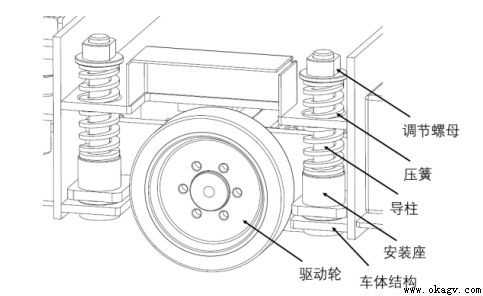
图9 垂直导柱式详细结构图
该结构应当合理布置导柱与驱动轮间的位置关系,如图10所示,为避免因力分配不均匀的原因导致导柱与导套间产生力矩,应将两导柱相对驱动轮触地点居中布置。若导柱没有居中放置,两边的弹簧反力并不相等,造成反力较大一端压缩量较多,反力较小一端压缩量较小,此时,导柱与导套间必然会产生力矩使移动副发生卡滞。
为进一步防止导柱与导套间发生卡滞,如图11所示,两导柱的中心连接线应处于驱动轮宽中心。如图12所示,当两导柱的中心连接线偏离驱动轮宽中心时,驱动轮的支承力与弹簧反力间存在力矩的力臂,在导套与导柱的配合面上必定产生对顶力,使移动副发生卡滞。
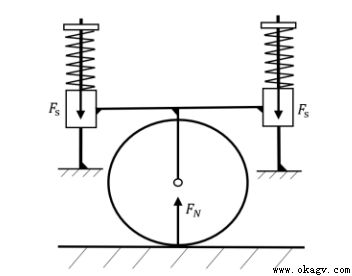
图10 垂直导柱式结构的受力图
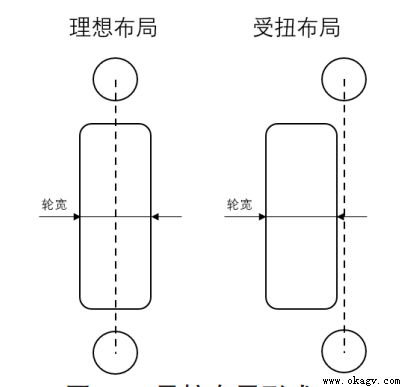
图11 导柱布局形式
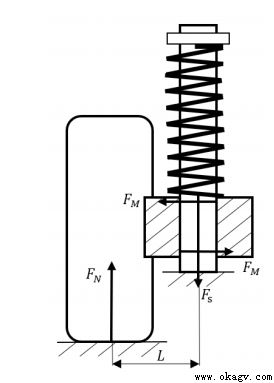
图12 导柱偏移的受力情况
整体而言,垂直导柱式浮动的结构占用体积较小、结构简单。从成本方面而言,是较为经济的一种减震结构,比较适用于对空间具有限制的轻中载轮系布局。
导柱的受扭卡滞是该结构的局限点,为解决该问题,应当合理布局导柱与驱动轮的相对位置关系。在此同时,增加导柱与导套的配合长度,可有效减小因受扭产生的对顶力,减小导柱导套的卡滞概率外,避免导柱受扭弯曲变形的可能。
(3)剪叉式。剪叉式浮动结构是基于剪叉举升结构所延申出来的一种减震结构。其中包含了剪叉式举升结构的上下托架,中间通过剪叉进行连接并在两托架中间设置有减震弹簧。
该结构的减震浮动型式与剪叉式举升相同,在遇到路面不平整时,下托架会垂直向上压缩并靠近上托架,同时,下托架与上托架间水平方向也会发生位移。
由于剪叉结构在高度空间的占用较大,此减震结构更多的是适用于差速单元模块。其中,剪叉结构的中间部分的空间可以被有效利用,差速驱动模块在包含路面适应功能外,其单元模块还具备相对车体旋转的转向功能以提高AGV的转向性能。因此,关于转向的结构完全可以放置于剪叉结构的中间空间,以使得在具备减震以及转向功能的同时节省更多的空间。
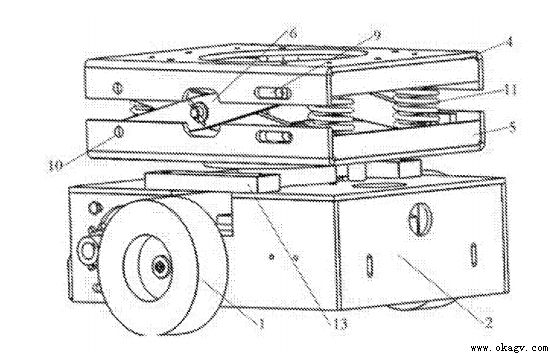
图13 剪叉式浮动详细结构图
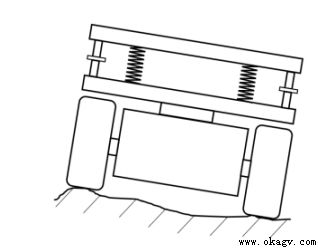
图14 剪叉式浮动详细结构图
剪叉式浮动结构整体相对减震模块而言体积占用较大,其更多是与差速转向结构相结合,将两者结构空间合并。其结构不适用于对空间要求较高以及带有转向功能的舵轮布局。
在路面适应性中,剪叉式结构具有一定的局限性。如图14所示,当两驱动轮的路面高度不一致时,由于剪叉结构并没有更多的自由度来适应两侧的高度不平,则使AGV整体被倾斜地顶起。
(4)摆动桥式。摆动桥式结构通过整桥式将两个轮子连接起来,以桥的中心作为摆动中心与车体铰接。摆动桥式的路面适应结构常见于装载机以及相关的工程机械中,通过释放整桥的旋转自由度来适应地面的不平整。弹簧在该结构中主要起到了减缓冲击的作用,在实际的应用中,若路面仅仅只是不平整而没有给驱动单元带来更多的冲击,摆动桥式的浮动结构可以无须设置弹簧。地形的不平整使得两轮的支承力离摆动中心的距离不一样,则力臂较远的轮子支承力小,力臂较短的轮子支承力大,浮动结构由此来适应路面的不平。
对于一个摆动桥结构而言,两个轮子始终通过摆动适应不平路面,实际可视为将桥上两个轮子变化为整桥的1个大轮子。那么,对于摆动桥式的四轮布局来说(图 16所示),即将四轮布局变化为三轮布局,在三点确定一个平面的理论上,三个轮子必然接地,从而解决了所有轮子共同着地的问题。
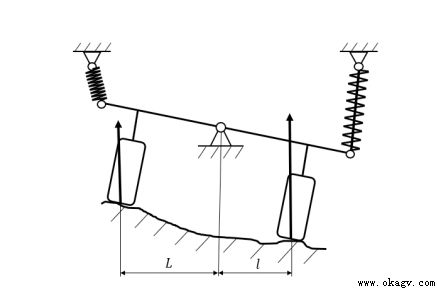
图15 摆动桥式浮动结构简图
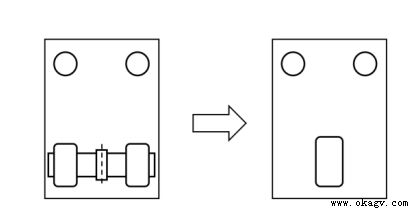
图16 摆动桥的轮系演变
对于六轮布局等多轮系布局,通过摆动桥式结构实现路面适应则需要设置更多组的摆动桥。由上述分析,一个摆动桥可视为将两个轮子变化为1个轮子。由于三
轮必定接地,六轮布局须将六轮变化为三轮,即需要3组摆动桥结构。
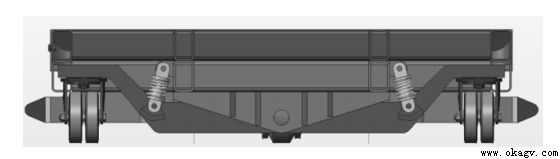
图17 摆动桥结构具体应用
(5)四边形式。四边形式浮动结构是基于四连杆的摆动原理,在其基础上增加减震弹簧,使其结构摆动时压缩减震弹簧而实现的减震效果。
四边形式浮动结构的减震型式比较类似于铰接摆动式浮动结构,两者均是通过绕着铰接点旋转来压缩减震弹簧从而起到减震效果,然而,这两者在运动结构以及受力上不全相同。
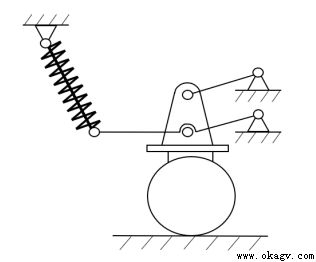
图18 四边形式浮动结构简图
如图19 所示,四边形式浮动结构的上下浮动方式是四连杆机构的摆动原理,而铰接摆动式浮动结构的上下浮动方式是绕铰接点作圆周运动的原理。
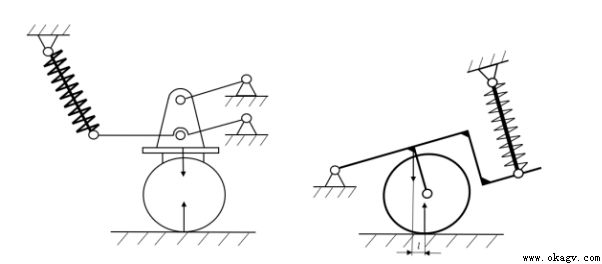
图19 四边形式与铰接摆动式的受力对比
四连杆的摆动原理可实现驱动单元在浮动时其姿态不会发生改变,而铰接摆动式结构的驱动单元在浮动过程其倾角会逐渐变化。倾角的变化使得驱动轮的支承力与安装座的支反力间产生力臂,从而使驱动单元受扭。
表1 AGV常见减震浮动结构特点分析
四边形式浮动结构在浮动过程中姿态不会发生改变,其驱动单元与安装座间的力始终共线。
四边形式浮动结构对竖直方向的空间要求较大,其结构相比铰接摆动式结构复杂,此类结构一般应用于叉车式 AGV 的立式舵轮以及差速驱动中。
对AGV常见的减震浮动结构特点分析见于表1。从目前国内的 AGV 减震型式来看,大载重的舵轮布局更多的是采用铰接摆动式浮动结构,对于载重较为小的舵轮布局则采用垂直导柱式结构。对于差速驱动,对于路面适应性要求较高的布局一般采用独立悬挂的减震型式,其包括了铰接摆动式、垂直导柱式、四边形式。
AGV的主要轮系布局包含差速布局和舵轮布局,针对其布局的型式不同,其减震的结构方式也应当分析其影响的轻重。
参考文献:
[1] 孙建民 . 工程车辆减震系统的关键技术探讨[J]. 筑路机械与施工机械化 ,2011,(6):80-82.
[2] 马越 , 王永恩 , 马睿 . 重载 AGV 机械结构设计[J]. 机械研究与应用 ,2018(2).
[3] 吕王彪 , 刘昊 , 吴永海 . 浮动式驱动装置及AGV[P]. 杭州:CN207257828U,2018-04-20.
[4] 周正军 , 刘其信 , 卢辉文 . 一种自动导航车的驱动悬挂装置及自动导航车[P]. 广东:CN106494257A,2017-03-15.
[5] 彭华明 , 朱忠 , 彭清华 , 曹睿 .AGV 舵轮驱动减震机构和AGV舵轮驱动装置[P]. 广东:CN206327106U,2017-07-14.
[6] 赵华东 , 徐一村 .AGV 剪刀叉式减震单元旋转限位机构[P]. 广东:CN206187160U,2017-05-24.文章来源于AGV吧
上一条:AGV智能仓储机器人结构优化设计 下一条:AGV自由路径导引介绍
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询