欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






欧铠agv管制配置,顾名思义就是用于设定AGV在行走中交通管制点的配置。管制配置主要有三个地方的交通管制配置:常规交通管制参数配置、充电点特殊管制配置、任务替接点。如下图19
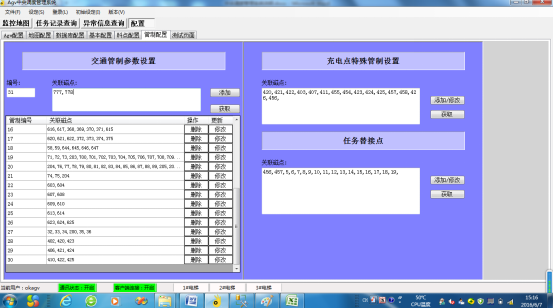
图19 管制配置
常规交通管制配置,用于设定正常路线上管制点。交通管制的原理为:在交通配置里面设定同一范围内的磁点,软件判断哪一辆AGV先进入该管制范围,若有AGV进入该范围,则将该区域锁定,直到该AGV走出此范围再将其锁定解除,允许其它AGV进入。此管制方法相对比较灵活,也可使用嵌套的方式,实现多重互锁。管制范围可进行添加、修改、删除操作。
上一条:AGV磁点如何设定? 下一条:欧铠无轨惯性导引AGV介绍
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询