欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






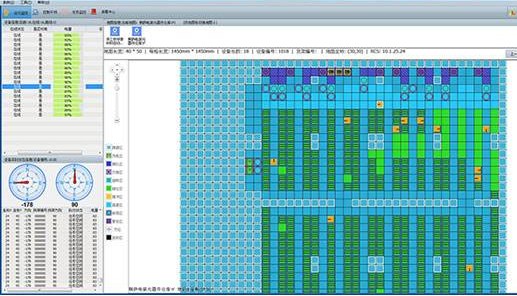
智能仓储移动机器人路径规划方法包括以下步骤:首先移动机器人在模拟的环境中进行训练;
a1:设置移动机器人运动时的目标,随机初始目标点坐标位置信息(xt,yt)和目标半径范围Rm;xt、yt分别表示目标点的中心在静态地图中的X、Y轴坐标,Rm表示以(xt,yt)为中心的边长为dmin的正方形区域,在区域中都可算到达目的地,设定移动机器人当前的位姿(x,y,θr),x、y是移动机器人当前的位置坐标,θr是移动机器人实时的运动方向与X轴的夹角,并通过目标点在移动机器人极坐标下的位置信息(θ,d)进行路径规划,并以固定速度向前行驶,θ是目标点在移动机器人极坐标下的角度信息,d是目标点距移动机器人中心的距离信息;
a2:导航过程中,将移动机器人上激光传感器检测到的环境数据Li和目标位置数据Di进行预处理与特征化,然后相融合得到环境数据Si;
a3:利用深度确定梯度策略方法,得到下一步的动作状态a,a∈W代表执行动作时移动机器人所偏转的角度在W范围内;
a4:判断移动机器人是否到达目标点(xt,yt),如果没有则返回a2继续导航,如果已到达则结束导航;
a5:结束导航后,根据奖励值,更新深度确定梯度策略方法中的策略子网络,评价网络参数,在训练的成功率达到目标成功率后,保存在深度确定梯度策略方法中的网络参数;S2:实际环境移动机器人导航使用在S1中保存了网络参数的深度确定梯度策略方法进行移动机器人动作选择。
上一条:叉车式AGV用举升系统 下一条:视觉导航AGV技术的机器人
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询