欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






AGV导航技术分析
随着工厂自动化,计算机集成的制造系统技术逐步发展和自动化立体仓库的广泛使用,AGV作为物流管理系统一个重要部分,其自身的范围和技术水平都得到了迅猛的发展。但是往往越来越多的人了解它,觉得需要它,但是不怎么了解它,然后担心AGV的种种问题。在这里我给大家简单介绍下AGV导航方式,让那些觉得有需要的公司有一个简单的了解。
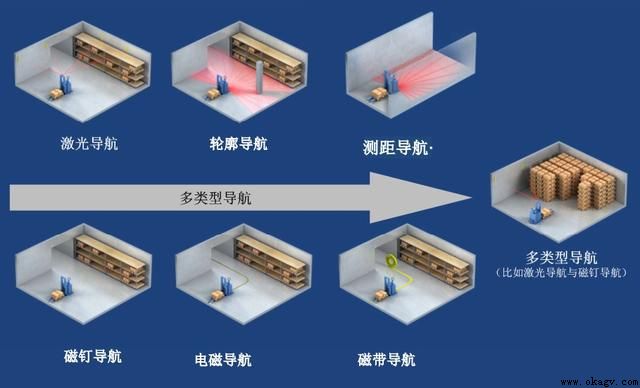
图1 AGV导航技术总览图
激光导航
激光导航是在AGV行驶路径的周围安装激光反射板,AGV通过发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和方向,并通过连续的三角几何运算来实现AGV的导航。
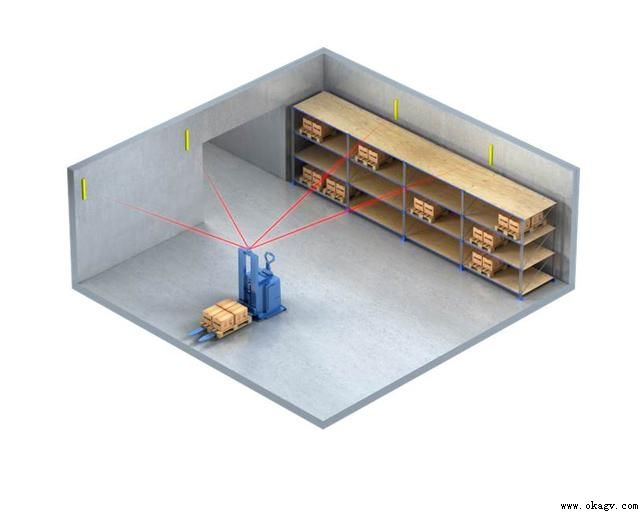
图2 激光导航
上一条:激光AGV导航技术优缺点分析 下一条:AGV技术分支框架图
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询