欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






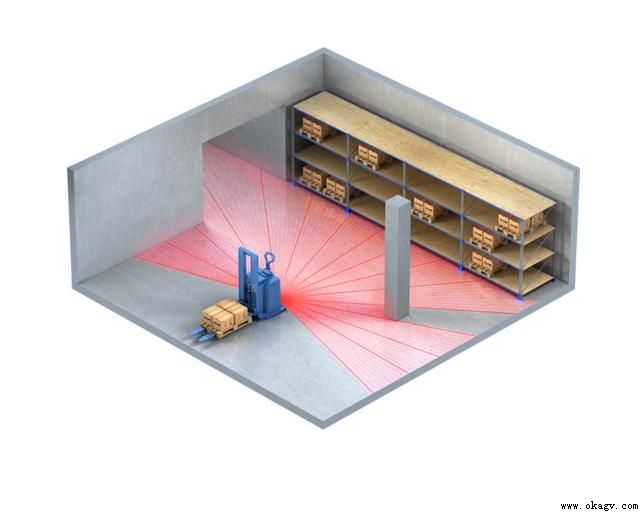
轮廓导航
轮廓导航是目前AGV最为先进的导航技术,该技术利用二维激光扫描仪对现场环境进行测量、学习,并绘制导航环境,然后进行多少测量学习,修正地图进而实现轮廓导航功能。
轮廓导航
利用自然环境(墙壁、柱子以及其它固定物体)进行自由测距导航根据环境测量结果更新位置。
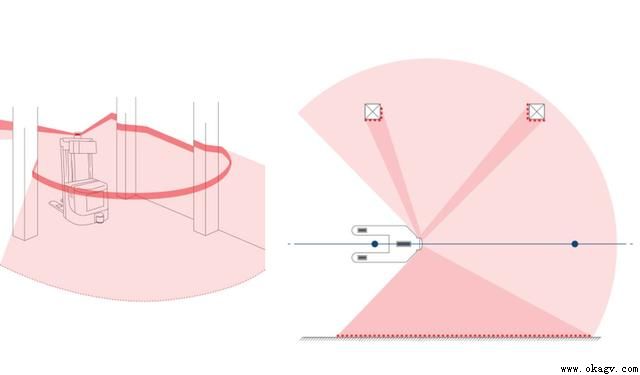
轮廓导航原理
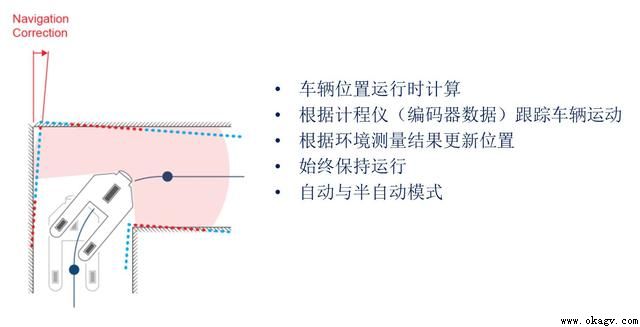
轮廓导航转弯实现原理
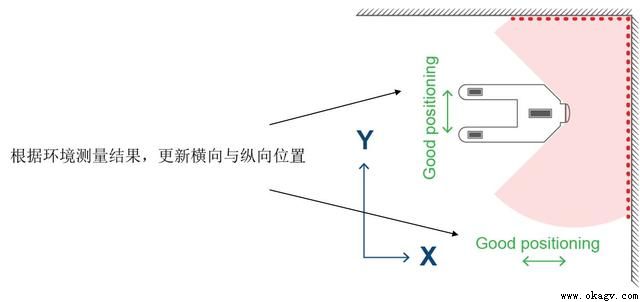
轮廓导航环境测量实现
目前轮廓导航传感器类型:
1、采用具有测量功能的安全激光扫描仪。
2、采用具有测量功能的激光扫描仪
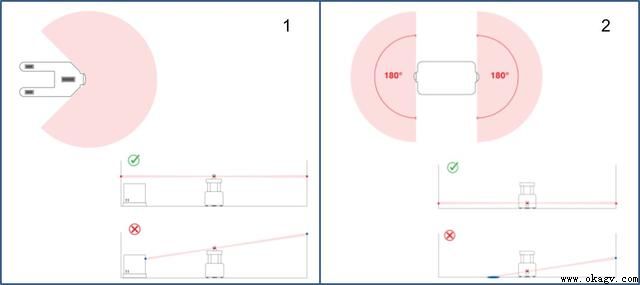
轮廓导航传感器安装分类:
获得足够大的视野是轮廓导航的必要条件:
将单个传感器安装在高处,以获得270度视角。
安装两个传感器,以获得超过270度的视角。确保水平对齐。
轮廓导航安装方式
货物应设置在适当范围内(比如最大距离 30 米,在可行性评估时,采用使用 20 米) 以及在两边与前面,以实现完整的位置更新 ,这点很重要。
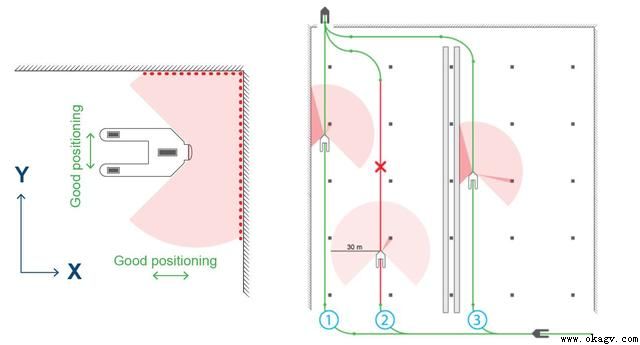
轮廓导航AGV路径设置
环境动态变化
预知传感器视角会因员工、车辆、门与设备移动而临时移动,这在一定程度上是可以接受的。设备、车辆、托盘与其它固体要在车辆行驶时保持静止,这面临的挑战更大。
至少 50% 的传感器读数来自实测图中的物体。

轮廓导航环境动态评估
轮廓导航优点:
1、不需要反射器或其它人工地标
2、降低安装成本
3、减少维护工作
4、激光导航替代方案
上一条:混合导航与光学导航技术 下一条:电磁导航agv的优缺点
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询