欧铠专业提供仓储物流升级改造、无人搬运机器人产品
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860
国家高新技术企业,深圳市专精特新企业,深耕AGV搬运机器人领域12年
全国服务热线 400-007-3860






无人搬运车(Automated Guided Vehicle,简称AGV)作为自动化运输搬运的重要工具,近年来的应用越来越广泛。而导航导引技术作为AGV的核心技术之一,对于AGV技术的发展起着至关重要的作用,甚至有种说法是“AGV技术发展史就是导航导引方式的演进史”。AGV在工作过程中,只有精确地定位自身所处的位置才能有效进行作业。

AGV导航导引的关键技术
AGV的导航导引是指AGV根据路径偏移量来控制速度和转向角,从而保证AGV精确行驶到目标点的位置及航向的过程。主要涉及三大技术要点:
1.定位
定位是确定AGV在工作环境中相对于全局坐标的位置及航向,是AGV导航导引的最基本环节。
2.环境感知与建模
为了实现AGV自主移动,需要根据多种传感器识别多种环境信息:如道路边界、地面情况、障碍物等。AGV通过环境感知确定前进方向中的可达区域和不可达区域,确定在环境中的相对位置,以及对动态障碍物运动进行预判,从而为局部路径规划提供依据。
3.路径规划
根据AGV掌握环境信息的程度不同,可分为两种类型:一个是基于环境信息已知的全局路径规划,另一个是基于传感器信息的局部路径规划,后者环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。

常见的AGV导航导引方式
1.电磁导引(Wire Guidance)
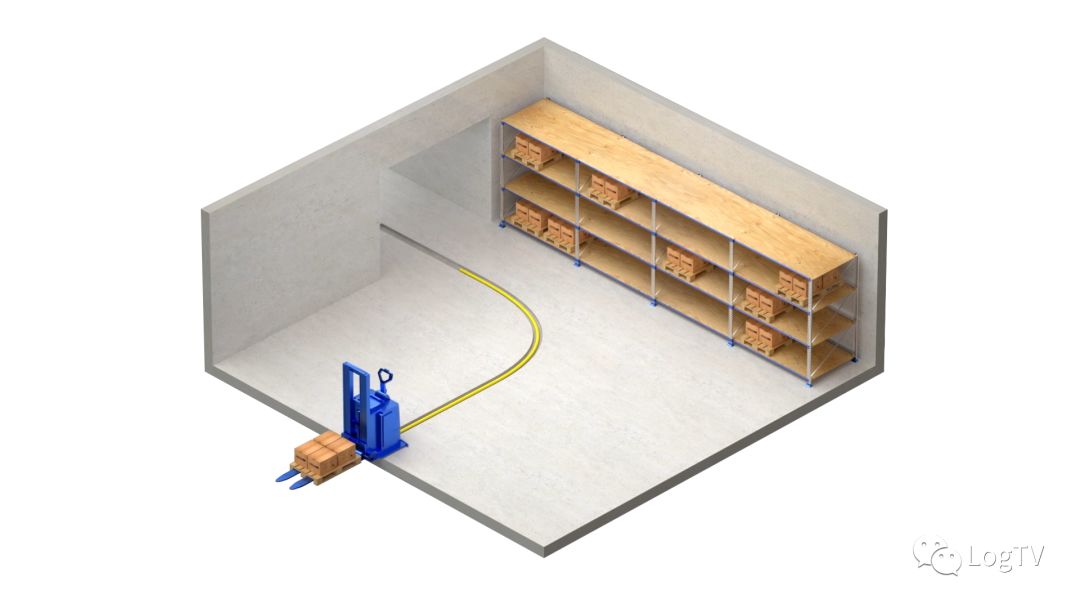
电磁导引是早期的AGV导航导引方式之一,技术比较成熟。该技术是通过在地下埋设金属线,AGV通过车载电磁传感器感应金属线发出的磁信号来实现导引。这种导引技术的优势在于原理简单,不受声光干扰,制造成本低,埋藏的金属线不易损坏。但是缺点同样明显,首先是后期难以扩展和更改路线,也无法在工作过程中实时更改任务,容易受到金属等磁性物质的干扰。
2.磁带导引(Magnetic Tape Guidance)
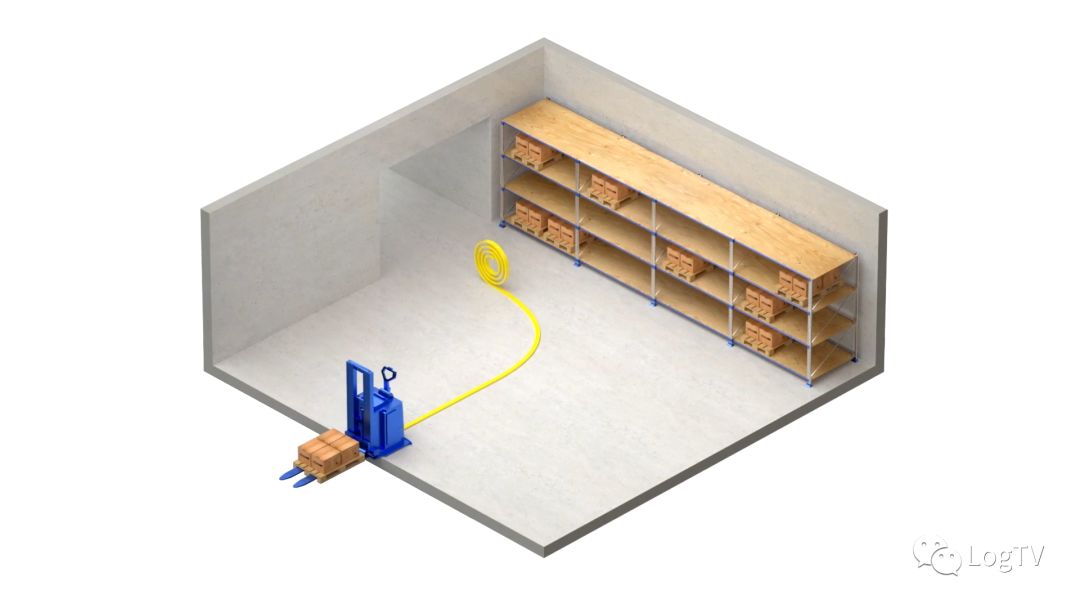
磁带导引与电磁导引的原理类似,通过在地面上铺设磁带的形式实现导引,灵活性比电磁导引较高,重新铺设磁带进行二次变更也较容易。但是仍无法实时更改任务,AGV只能沿磁带行走,同样易受磁性物质干扰。磁带铺设在地面上,也容易受到损毁,需定期维护。
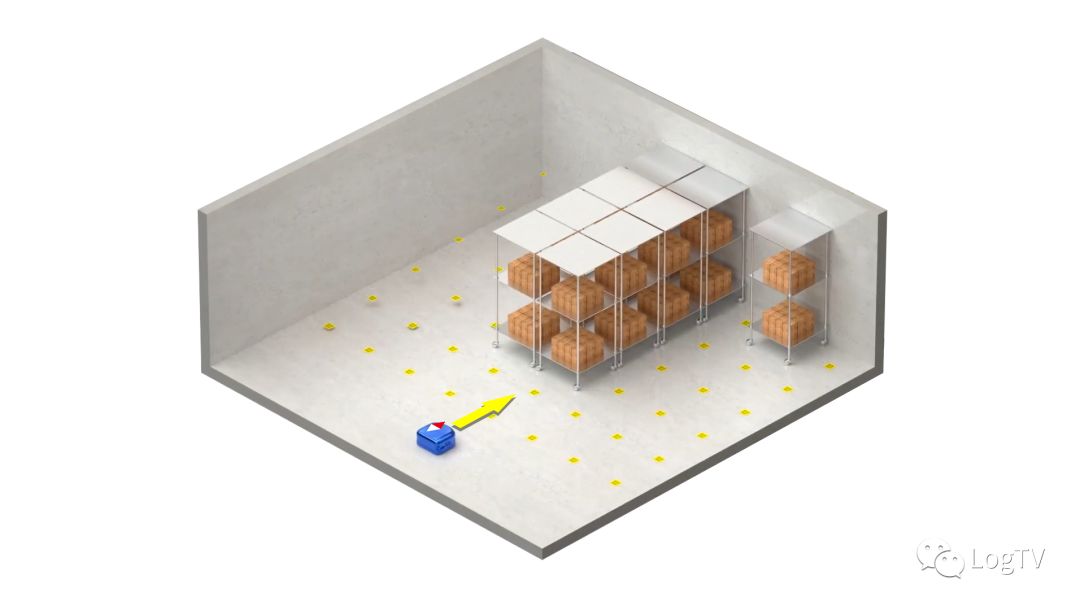
3.二维码导引(QR code Guidance)
二维码导引方式是通过离散铺设QR二维码,通过AGV车载摄像头扫描解析二维码获取实时坐标。二维码导引方式也是目前市面上最常见的AGV导引方式,二维码导引+惯性导航的复合导航形式也被广泛应用,亚马逊的KIVA机器人就是通过这种导航方式实现自主移动的。这种方式相对灵活,铺设和改变路径也比较方便,缺点是二维码易磨损,需定期维护。
4.惯性导航(Inertial Navigation)
惯性导航是在AGV上安装陀螺仪,利用陀螺仪可以获取AGV的三轴角速度和加速度,通过积分运算对AGV进行导航定位,惯性导航优点是成本低,短时间内精度高,但这种导航方式缺点也特别明显,陀螺仪本身随着时间增长,误差会累积增大,直到丢失位置,堪称是“绝对硬伤”。使得惯性导航通常作为其他导航方式的辅助。如同上文所提到的二维码导引+惯性导航的方式,就是在两个二维码之间的盲区使用惯性导航,通过二维码时重新校正位置。
5.激光导航(Laser Navigation)
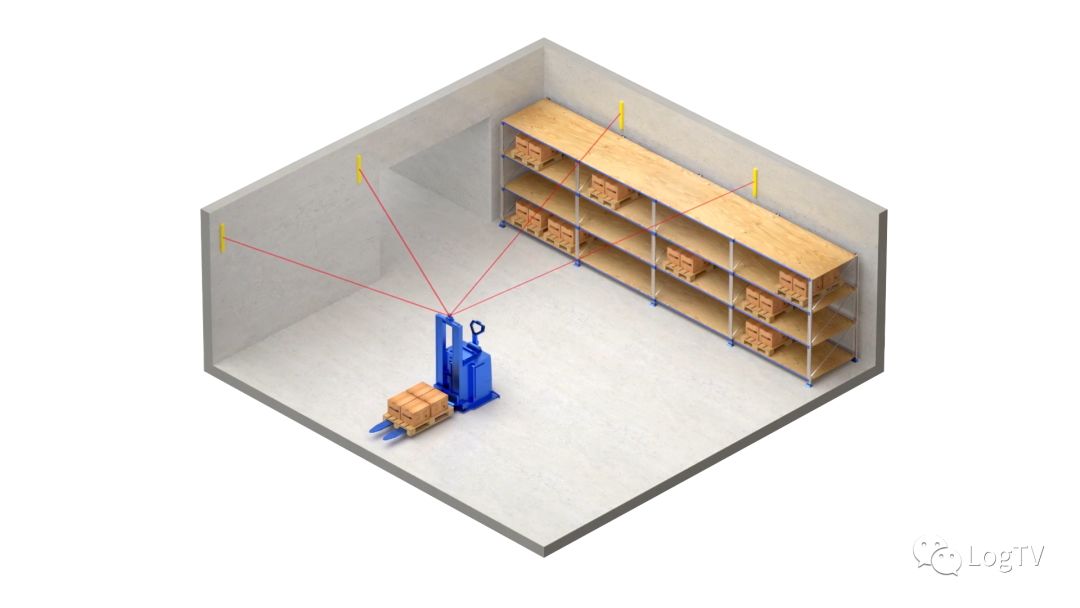
传统激光导航的原理是在AGV行驶路线上安装位置精确的反射板,AGV的车载激光传感器会在行走时发出激光束,激光束被多组反射板反射回来,接收器接收反射回来的激光并记录其角度值,通过结合反射板位置分析计算后,可以计算出AGV的准确坐标。其优势在于无需地面定位设施,灵活度高,缺点是制造成本高,对环境要求较为苛刻。
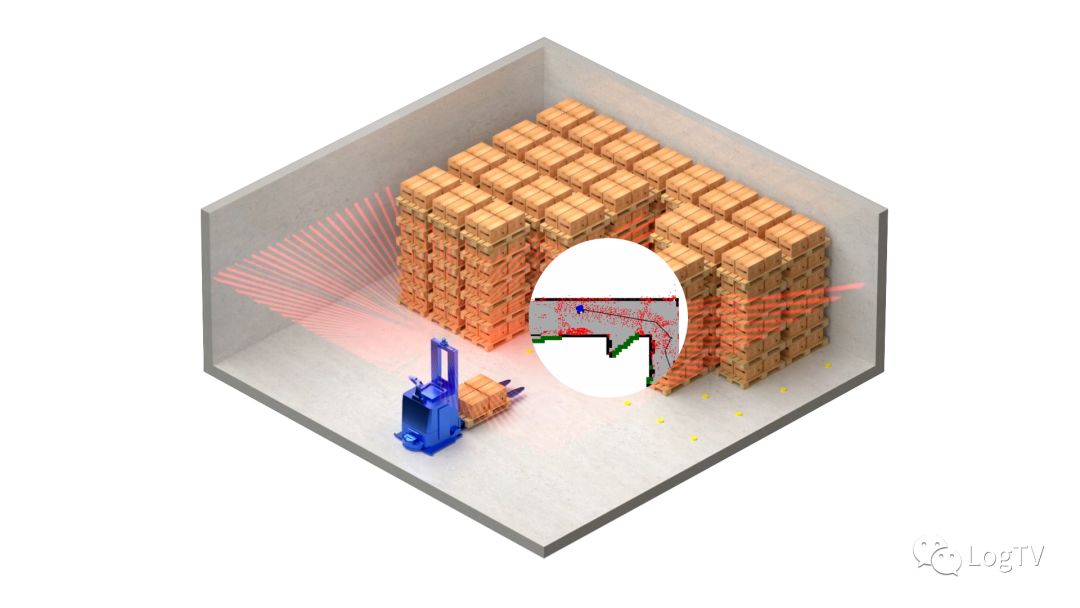
6.SLAM激光导航(自然导航)(Natural Navigation)
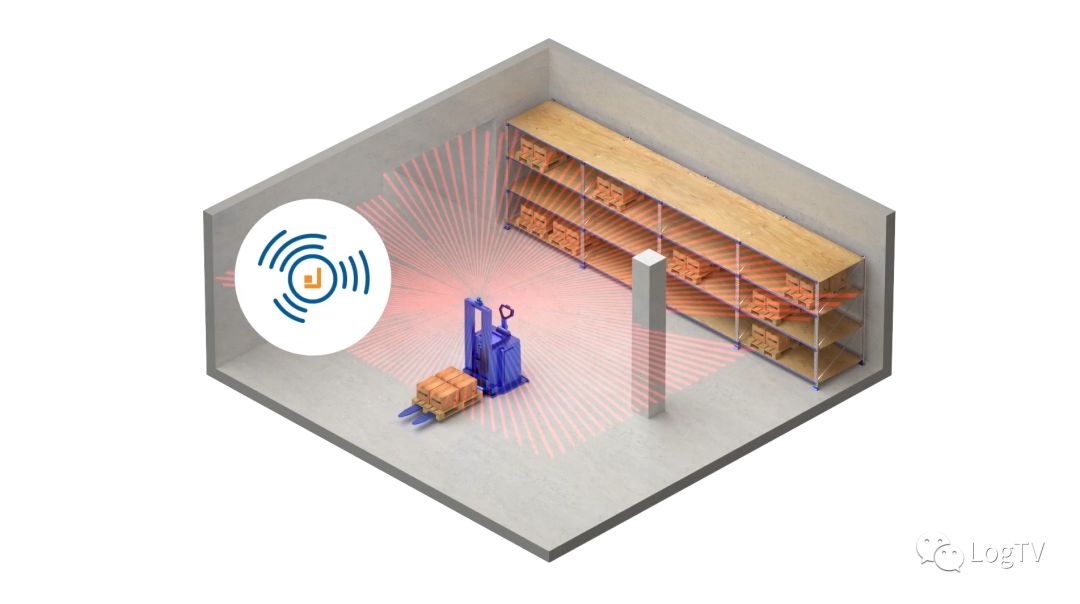
SLAM激光导航则是一种无需使用反射板的自然导航方式,它不再需要通过辅助导航标志(二维码、反射板等),而是通过工作场景中的自然环境,如:仓库中的柱子、墙面等作为定位参照物以实现定位导航。相比于传统的激光导航,它的优势是制造成本较低。据小编了解,目前也有厂商(如:SICK)研发了适用于AGV室外作业的激光传感器。
7.视觉导航(Visual Navigation )
视觉导航也是基于SLAM算法的一种导航方式,这种导航方式是通过车载视觉摄像头采集运行区域的图像信息,通过图像信息的处理来进行定位和导航。视觉导航具有高灵活性,适用范围广和成本低等优点,但是目前技术成熟度一般,利用车载视觉系统快速准确地实现路标识别这一技术仍处于瓶颈阶段。

AGV导航导引技术一直朝着更高柔性、更高精度和更强适应性的方向发展,且对辅助导航标志的依赖性越来越低。像SLAM这种即时定位与地图构建的自由路径导航方式,无疑是未来的发展趋势。相信在未来,5G、AI、云计算、IoT等技术与智能机器人的交互融合,将给AGV行业带来翻天覆地的变化,而具有更高柔性、更高精度和更强适应性的SLAM导航方式也将更适应复杂、多变的动态作业环境。
上一条:AGV调度系统详细介绍 下一条:视觉V-SLAM导航AGV优缺点
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询